|
智能汽车中的CAN会不会被以太网取代?要回答这个问题,我们首先得对传统车载网络通讯技术进行梳理。
一.什么是传统车载网络通讯
当前主流的车载网络主要由 CAN、LIN、FlexRay、MOST 、LVDS等构成。除了LVDS,这些网络标准基本上都是面向汽车行业制定,有着浓重的汽车行业特色。表1中对各种不同网络形式做了简要的对比。 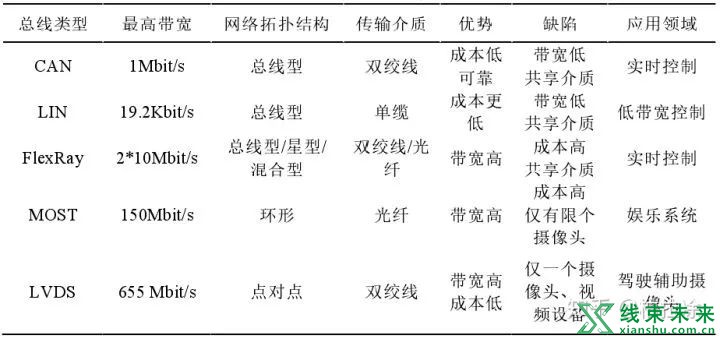
图1 传统车载网络对比
如图2,CAN是总线式通讯,具有高实时性、传输距离远、抗电磁干扰能力强、成本低等优点,能很好的适应传统车载ECU间的控制数据传输需求,是现役车载网络应用最为广泛的通讯标准,最大传输速度为 1 Mb/s,可以说兴起于20世纪90年代的控制器局域网(CAN)革命,对于整个汽车电子行业发展的推动是巨大的。 经过数十年的发展,今天的汽车行业CAN在车载网络领域占据着绝对的优势,CAN已经形成了完善的标准体系,这意味着CAN有着高度的兼容性、完善的开发工具链体系、更大的供应商选择余地和更低的采购成本(这对于整车开发是及其及其及其重要的)。 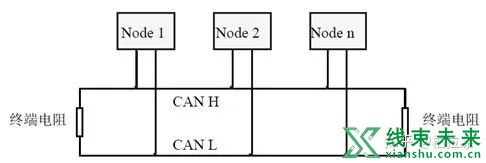
图2 CAN通讯简图 1.CAN的特点(1)它是一种多主总线,即每个节点机均可成为主机,且节点机之间也可进行通信。 (2)通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1mb/s。 (3)can总线通信接口中集成了can协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余校验、优先级判别等项工作。 (4)can协议的一个最大特点是废除了传统的站地址编码,雨代之以对通信数据块进行编码。采用这种方法的优点是可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块,这种数据块编码方式,还可使不同的节点同时接收到相同的数据,这一点在分步式控制中非常重要。 (5)数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而倮证了通信的实时性。 (6)can协议采用crc检验并可提供相应的错误处理功能,保证了数据通信的可靠性。can总线所具有的卓越性能、极高的可靠性和独特设计,特别适合工业设各测控单元互连。因此备受工业界的重视,并已公认为最有前途的现场总线之一。 CAN总线的优点: - 具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
- 采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
- 具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
- 可根据报文的ID决定接收或屏蔽该报文;
- 可靠的错误处理和检错机制;
- 发送的信息遭到破坏后,可自动重发;
- 节点在错误严重的情况下具有自动退出总线的功能;
- 报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
CAN总线缺点 1)不一致性 CAN总线中有一个著名的Last-But-One-Bit 错误。 CAN总线2 OA在信息认证(MessageValidation)中规定:发送器验错的范围可覆盖到帧结束,如果发现错误,以后就按优先权和状态的规定重发; 接 器验错的范围覆盖到帧结束的前一位。因此,如果由于空间干扰、电 源波动等原因,对于帧的倒数第二位,一部分节点A认为无错,一 部分节点B 认为有错,即出现了所谓的Byzantine 错误。 这时,根 EOF 应该是7 个隐性位,节点B 认为这是一种形式错误,所以就会启动错误帧,通知发送器重发,同时丢弃收到的帧。而认为设错的节点A 由于只查到倒数第二位,因此就会接收此帧。 如果在发送器例行的下一次发送前B 通知的重发成功,A就会收到重复帧; 如果重发不成功,B 就丢了一帧。在转向和制动系统中,4 个轮子对命令的不同理解,可能造成性能的下降或其他更严重的后果。 2)不可预测性 CAN总线将节点状态分为ErrorActive、Error Passive 和Bus Off 三种,这三种状态在一定条件下可以互相转换。不同状态中节点的发送有不同的延迟。 最高优先权的信息发送延迟有几种可能:当节点状态为ErrorActive 时,若总线空闲,则立即发送; 当节点状态为ErorActive时,如果其它帧正在发送,则需等正在发送的报文结束后,再过3 位后发送; 当节点状态为ErrorPassive 时,它有一个出错重发的要求,若没有其它帧要发送,等3 位传送(Intemission)和8 位挂起传送(Suspend Transmission)后重发; 当节点状态为Error Passive时,若总线空闲,出错后等别的信息发送完后再发,等待时间与其它帧的长度有关; 当节点状态为Bus Off 时,需等状态恢复到ErrorPassive 或ErrorActive 再发。 当确认某节点的状态时,还有几个因素需要考虑:首先,节点由最高优先权的信息和其他信息共用,因此,其他信息在传送过程中出现的错误也会影响到节点状态; 其次,进入ErrorPassive 或BusOff 状态的条件是发送错误计数器与/或接收错误计数器的值,由于CAN 的原子广播特点,其它节点的发送错误或接收错误会开启一个错误帧,从而影响到该节点的接收错误计数器的值,进而影响节点状态。 对于优先权较低的信息来说,发送时间的离散程度更大。在反馈控制系统中,采样调节周期的大范围抖动相当于信号延迟后的变化,它有可能使系统性能下降或不稳定。在与安全相关的开环系统中,抖动可能造成动作顺序的混乱。 3)信道出错堵塞 节点有可能受干扰或其它原因暂时或永久失效,出错的主机会命令CAN 收发器不断发送消息,即所谓的Babbling ldiot 错误。由于该信息的格式等均合法,因此CAN 没有相应的机制来处理这种情况。 根据CAN 的优先权机制,比它优先权低的信息就被暂时或永久堵塞。由于CAN总线存在上述几种根本的缺陷,因此,在更为严格的控制系统中,它将会造成巨大的风险,无法满足安全、环保、节能的要求。 CAN 的事件触发协议特点限制了ECU 的应用、开发与生产,不仅用过的ECU 难于重用,而且还不利于改善和开发新的ECU。
二.车载以太网的广泛使用
如果说2013年宝马在X5上拉开了以太网进军车载系统的帷幕(主要应用场景为360°全景、基于以太网的车辆诊断和刷新),那么可以毫不夸张的说时至今日以太网与汽车将迎来了一次深度拥抱的契机,它们也将共同演绎一场“融合”大戏。 车载以太网的起源以太网发明于1973年,并于1985年被电气和电子工程师协会(IEEE)标准化,开始了它在商业中使用的局域网中占主导地位,抵制了诸如令牌环之类的所有竞争技术。事实证明,以太网是通用的,可恢复的标准,可推动数十年来通信的发展。以太网版本通过同轴电缆,光纤和非屏蔽双绞线运行,并且速度已从10M bit/sec提高到100G bit/sec以上。经过数十年的使用,以太网已广为人知并得到完善。 随着智能汽车的高速发展,其中ADAS 及大量的传感器的数量提升,让智能汽车迎来了从分布式向域集中式过渡阶段,从全车 100 余 ECU 到 5 个 DCU,控制功能迅速集中。在域集中式汽车架构设计中,域控制器处于需要强大的计算能力、超高的实时性能以及大量的通信外设。因此,大量的高速传输需求,带来了车载网络通讯的变革,所以有网友认为以太网将成为域间控制器网络的网络骨干介质,并用于代替现有串行网络(如 MOST 和 FlexRay),未来高速总线将以以太网为主。 车载以太网相关优势介绍a.低成本下的高带宽 以博通公司采用的突破性 BroadR-Reach 技术为例,其可用单对的非屏蔽双绞线进行信号传输,并能够提供 100Mbit/s 及更高的宽带性能,并使电缆重量减轻 30%、降低连接成本可达80%。 b.支持不同应用的多种协议和功能 传统车载网络支持的通信协议较为单一,而车载以太网可以同时支持AVB(TSN)、TCP/IP、DOIP、SOME/IP等多种协议或应用形式。此外,1Gbit 速率通信标准的车载以太网同时还支持 POE(Power Over Ethernet)功能和高效节能以太网(EEE, Energy-Efficient Ethernet)功能。 c.适应未来的能力 以太网之所以如此成功,主要原因之一便是以太网是一种可持续更新、发展的技术。在经历了标准以太网(10Mbps)、快速以太网(100Mbps)和千兆以太网(Gigabit Ethernet)推进和发展后,以太网还在继续着不断的自我迭代升级。当然在支持带宽持续增长的同时,它任然保持对原有系统的兼容性。所以说:一旦以太网技术推广至汽车行业,它带来的不仅仅是一种成熟的通信技术,更是一种对未来的适应能力。 d.无线功能 多年来,最能体现以太网是如何适应新需求的、发掘新潜力的事例之一就是当前非常流行的无线网络wifi的引入。类似于Broadcom公司的BroadR-Reach,WiFi也有专供汽车使用的变体,“汽车环境无线存取”WAVE。车载以太网的普及无疑将成为WAVE引入汽车最佳催化剂,而在智能交通时代,WAVE也将为V2X提供新的想象空间。
三.车载以太网能否代替CAN?
车载以太网前期主要用于车内ECU的诊断和程序更新,以及单独某个子系统,如基于DoIP标准的OBD诊断设备;如使用 IP摄像头的驾驶辅助系统。现在更多的是将几个子系统功能整合(如显示系统、多媒体、驾驶辅助等),形成一个拥有功能集合的以太网小系统。 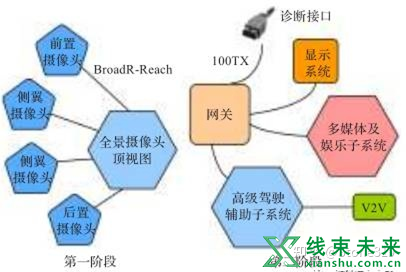
车载以太网的演进 车载以太网要想在未来替代CAN,会给工程师带来许多新的测试挑战。目前,汽车对高数据速率、带宽和数据安全性的需求不断提高,同时还要求做好更充分的准备应对未来需求,车载以太网为此提供了必要的先进功能,并克服了传统汽车串行总线在车载电子系统连接和通信方面的缺点。 车载以太网目前主要还是应用在低时延、高带宽的一些功能上,像是adas、音视频传输等。传统的can总线目前来看,没有替代的必要,还是会用的。不只是can,lin或其他总线也会同时存在。或许将来当控制器越来越少,它们之间的can总线会逐渐减少,直至消失。 未来随着车载以太网的发展和成熟,车载网络将会发展成为基于域控制器的混合车载网络架构:以太网或将成为主干网络,传统CAN、LIN将继续在低容量通讯场景下使用,但现在并未出现以太网完全替代CAV和LIN的汽车。 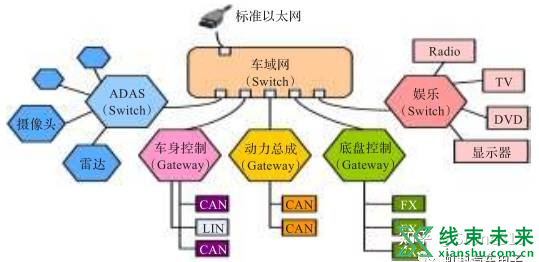
以车载以太网为主干的车载网络
四.总结
汽车智能化、网联化,甚至自动驾驶大浪已经来临;浪潮带来的是ADAS技术的革新、OTA、云计算等一系列技术的发展;这也推进了车载网络容量需求的爆发式发展,显然这已经超出了CAN等传统车载网络的历史使命,这也正是以太网与汽车深度拥抱汽车的契机。然而这种发展不是一蹴而就,也不是简单的A替代B,而是优势互补,共同发展。 未来以太网可能取代CAN成为骨干网,而子网将是由若干域控制器(Domain Controller)组成的车载网络结构,且以太网和CAN等传统车载网络将在较长的一段时间内共存。
免责声明:本网站的部分内容,来源于其他网站的转载,转载目的在于传递和分享更多信息,并不代表本平台赞同其观点和对其真实性负责,版权归原作者所有,如有侵权请联系我们删除。
| 








 |Archiver|手机版|小黑屋|线束未来-汽车线束的未来-线束知识-线束资料-线束标准-线束材料-线束智造-线束视频-产品云库-线束企业-求职招聘
( 冀ICP备2022002228号 )
|Archiver|手机版|小黑屋|线束未来-汽车线束的未来-线束知识-线束资料-线束标准-线束材料-线束智造-线束视频-产品云库-线束企业-求职招聘
( 冀ICP备2022002228号 )