|
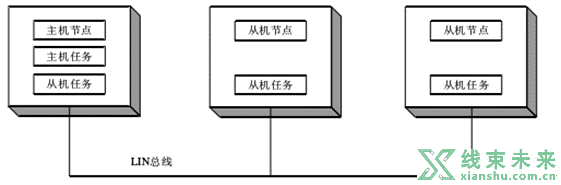
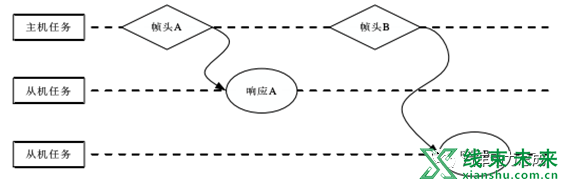
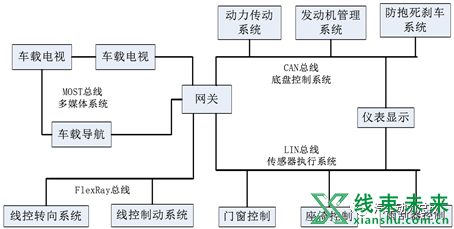
汽车电子化程度是衡量现代汽车水平的重要标志,而汽车电子技术的提升也带动了总线技术的发展。传统汽车电子采用点对点的通信方式,各单元之间没有联系,因此整车需要庞大的线束系统。不管从空间布置还是通信效率看,传统电气网络都无法满足现代汽车的要求。此外,现代汽车各ECU单元之间随时进行数据交互,如发动机转速、节气门位置以及车速,必须把各节点接入到总线网络,实现信息共享。由于各电子单元对通信实时性要求不同,基于多总线技术的现代汽车网络便应运而生。 一 LIN总线技术
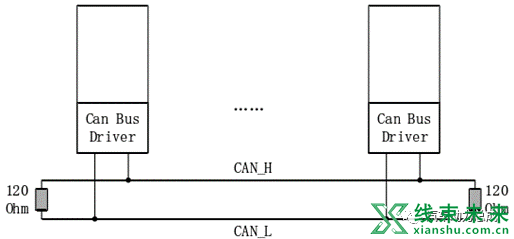
二 CAN总线技术
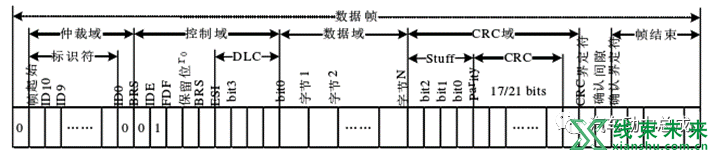
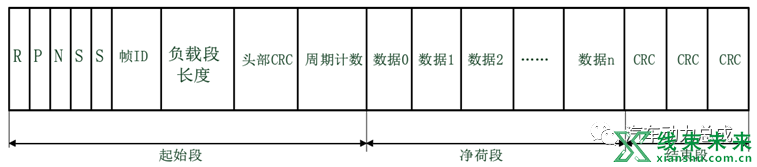
三 CAN FD总线技术
Positive)状态。
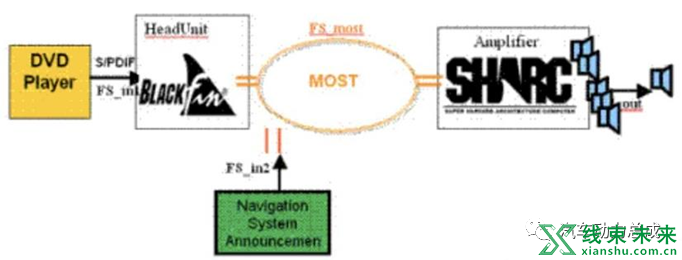
11898(2015)公布的 CAN FD 物理层和数据链路层协议均没有涉及到安全方面的内容,CAN FD节点间的传输都是通过明文传输,外界容易根据大量CAN FD报文推测出线性规律,获取通信双方真实的数据; FD网络由各节点组网而成,所有节点均连接到一条CAN FD总线,一旦有节点发出消息,其余节点都能收到消息。利用此特点,只要接入到CAN FD总线,就能监听所有节点间的通信,缺乏私密性保护; FD报文同时活动于总线上时,根据ID优先级仲裁避免总线冲突,ID越小优先级越高,低优先级必须等待高优先级发送完才可发送,这样,袭击者便可不断发送高优先级报文,从而使低优先级报文难以发送,实现拒绝服务通信; FD没有对各节点地址进行标注,只通过报文标识符(ID号)对数据进行编码。难以获知到底哪个节点才是消息源,因此,只要某个节点被劫持,就可以伪造其他节点的发送,接收方也没有相应的机制对消息源进行认证。 四 MOST总线技术
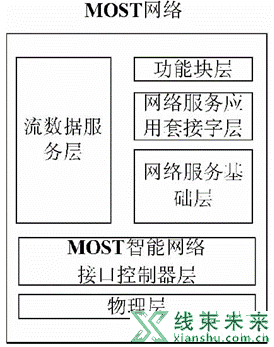
Channel)与控制信道(Control Channel)的设计定义,控制信道即用来设定如何使用与收发数据信道。一旦设定完成,资料就会持续地从发送处流向接收处,过程中不用再有进一步的封包处理程序,将运作机制如此设计,最适合用于实时性音讯、视讯串流传输。MOST在制订上完全合乎ISO/OSI的7层数据通讯协议参考模型,而在网线连接上MOST采用环状拓朴,不过在更具严苛要求的传控应用上,MOST也允许改采星状(亦称放射状)或双环状的连接组态。
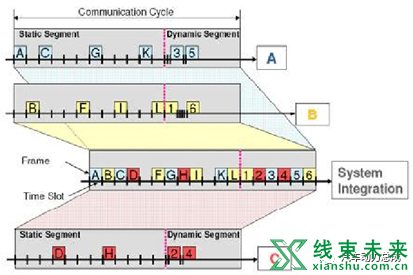
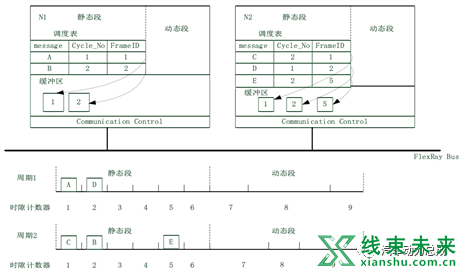
五 FlexRay总线技术
六 结语
免责声明:本网站的部分内容,来源于其他网站的转载,转载目的在于传递和分享更多信息,并不代表本平台赞同其观点和对其真实性负责,版权归原作者所有,如有侵权请联系我们删除。 |

分享到: