|
前几篇内容更多是从全局的视角阐述软件定义汽车,但写这个系列并不只是为了介绍软件架构,也不是为了给大家推销理念或普及概念,而是为了构建一张完整的全系统知识图谱,系统性的探讨在实现过程中的各种技术问题。按照我的想法,后续工作将按以下两个阶段进行 :1. 设计阶段;2.开源实施阶段。
第一阶段通过系列文章以及和大家的交流讨论,梳理要解决的关键问题,确定解决这些问题的技术路径,设计关键组件的技术架构。
第二阶段将着手搭建关键软件组件的代码框架。"Talk is cheap, show me the code" ,对我而言,架构设计不只是画几张图就完事了,搭建一个基础的代码框架,也是保证架构设计能够快速推进的有效手段之一。如果你是软件产品设计、架构设计、程序设计的高手,又对开源软件感兴趣,可以在后台留言,这种局面是有机会做点事情的,兴趣驱动无任何商业目的,欢迎各路geek参与讨论!
在科技圈工作久了的人,估计也很难理解,为啥汽车行业会形成这种群雄割据的状态,汽车软件的封闭性,看似给这个行业构筑了壁垒,实际上也限制了整个行业生态的发展,开源软件造就了今天人工智能行业的繁荣,但一眼望去,整个汽车软件行业依然一片沉寂,都知道软件很重要,可是符合行业要求的人才从什么地方来呢?
构建一个面向车载的全栈软件参考方案,思考并解决各个组件在车载环境下面对的挑战(实时可靠、功能安全、信息安全),一方面为各方提供一些参考设计和思路,另一方面也为刚入门的行业初学者领领路,软件方面将重点围绕以下主题展开:
中央计算单元的架构
完整的数字系统架构,是软件定义汽车的技术基础,应该是由,电子电气架构+计算单元硬件架构+软件架构三部分组成。
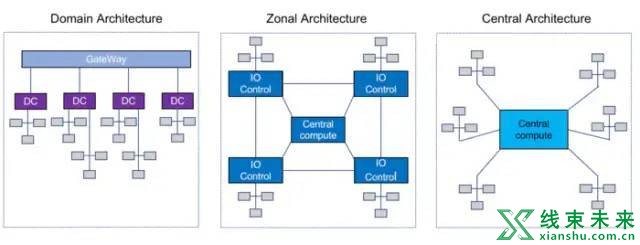
EEA 构型.jpg
传统的整车部门也会有电子电气架构,其涵盖的内容很广,但是数字系统更多的关注通信与计算的部分,两者是一个互补的合作关系。在Domain向Zonal发展过程中就产生了一个分水岭,Domain之前传统的EEA部门就能完全应对,Zonal 之后由于新增了大量的软件开发工作,需要与软件团队高度合作。
今天讨论的重点不是EEA架构,而是其中最关键的部分,中央计算单元,不管是按区域的架构,还是以后的纯中央计算平台,其硬件构型从根本上决定了软件架构的设计方向。
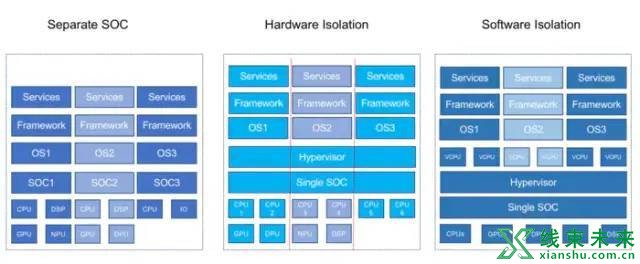
中央计算单元构型.jpg
中央计算单元可以分为以下三种形态:
分离式是指,将多个不同的芯片集成到一个中央计算单元上去,每个运行不同的操作系统,只是在形态上集中到了一起,各单元依然独立的完成各自任务,代表如特斯拉AP,奥迪zFAS等。
硬件隔离式是指,在统一的计算平台上采用虚拟化方案,同时运行多个操作系统,但是各个系统依然在硬件上进行隔离,每个系统都有自己的专属硬件资源。
软件虚拟式是指,在统一的计算平台上采用虚拟化方案,同时运行多个操作系统,每个操作系统所使用的硬件资源,由Hypervisor层动态调配,每个系统并没有专属的硬件资源。
分离式最大的好处就是功能边界清晰,相比于传统的独立的BOX,只需要在电路设计上,把每个芯片放在不同的PCB板,然后将多块PCB叠加在一起。坏处就是,硬件资源浪费,每个芯片都需要一个最小系统,并且硬件上还没法拓展。
硬件隔离式和软件虚拟式,都采用了虚拟化方案,唯一不同点在于硬件资源是否专属,如果是专属的,就意味着资源无法动态调配,容易产生资源浪费。虚拟化方案最大的好处是,硬件上的可拓展性,如果中央计算单元采用刀片式的设计结构,可以很方便的拓展计算单元的算力,而不用替换整个计算单元。
谈到Hypervisor虚拟化,大家最大的顾虑就是稳定性,其实在中央计算单元中,只需要两个操作系统即可,用于自动驾驶、车控、网关的RTOS,以及用于娱乐的普通OS(如Android、Linux)。用于娱乐的OS完全可以通过虚拟机的方式运行,用于自动驾驶、车控、网关的RTOS,可以直接运行在Hypervisor层,这样在兼顾实时计算的要求的前提下也能获得丰富的娱乐系统功能。 结语前面几篇介绍了面向服务的架构设计SOA,但是SOA其实只是解决了软件定义汽车中的一个问题,即服务的开发、通信等问题,他只是整个技术栈当中的一环,而且也并不是解决这个问题的唯一途径。收到了一些专家的反馈,他们认为应该从更高的维度去阐释软件定义汽车,架构设计中,不仅要包含车载计算,还应考虑其与云端、边缘端等的关系,所以接下来将从底层的基础系统入手,逐步向上拓展,将这个分布式系统的范围进一步扩大。 本篇只是开了个头,下一篇将重点探讨,Hypervisor虚拟化技术在基础系统架构中的应用。
免责声明:本网站的部分内容,来源于其他网站的转载,转载目的在于传递和分享更多信息,并不代表本平台赞同其观点和对其真实性负责,版权归原作者所有,如有侵权请联系我们删除。 |